News

All fired up, with somewhere to go!
A rocket test stand to test engines with a thrust of up to 24kN relies upon CAN FD Read More
Read More
Visible at a distance: The Kvaser U100’s smart LEDs
Interface LEDs can be difficult to see at a distance. Kvaser’s engineering team sought to resolve this issue with two… Read More
Read More
AN AFTERNOON OUTSIDE IN THE SUN
Last week we had an amazing day in the sun with our collegues here in Sweden. Due to the covid situation many of us are working from home so this was Read More
Read More
Técnico Solar Boat Leads Field on Electronically Controlled Hydrofoils
The TSB team overcomes challenges to create and compete on a boat moved exclusively by renewable energies. Read More
Read More
Introducing the Kvaser U100, the new reference in rugged CAN interface design
Kvaser AB unveils the Kvaser U100, a robust, single-channel CAN/CAN FD to USB interface with reinforced galvanic isolation. Read More
Read More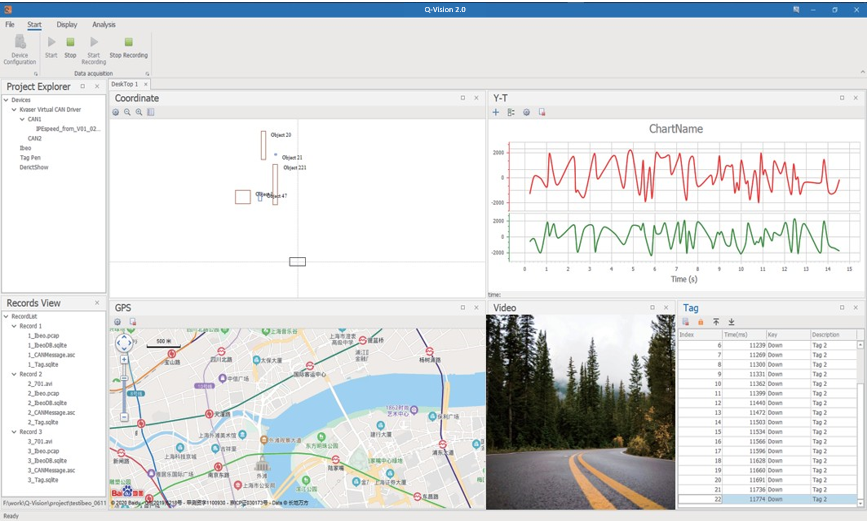
Solution with Q-Vision + Kvaser CAN/CAN FD/LIN
Fast development of intelligent networking technology in China, coupled with the driving forces for vehicle intelligent networking, has led to… Read More
Read MoreSpecification for J1939 over CAN FD published
On March 22, 2021, SAE published the SAE J1939-22 document. This document is the latest addition to the J1939 set… Read More
Read MoreKvaser 2021 Product ‘Not For New Design’ (NFND) Announcement
NFND announcement for: Kvaser Leaf SemiPro HS (EAN: 73-30130-00242-5) Kvaser Leaf SemiPro LS (EAN: 73-30130-00260-9) Kvaser Leaf Professional LS (EA Read More
Read MoreWebinar: CAN FD Data Acquisition and Visualization with MATLAB and Kvaser Hardware
MathWorks and Kvaser are hosting a joint webinar to support customers using MATLAB’s Vehicle Network Toolbox to transition to CAN… Read More
Read More
KVASER INTERVIEW – DAVID BENJAMINSSON
Who are we here at Kvaser? Every two weeks there will be an interview with one of our employees where you can get to know them for real! This week we Read More
Read More linkedin
linkedin twitter
twitter youtube
youtube youku
youku weixin
weixin