News

Mach Systems introduces a CAN-LIN Gateway ECU
New configurable CAN-LIN gateway ECU with up to two CAN/CAN FD channels, a LIN channel, and several multi-purpose digital/analogue inputs and outputs. Read More
Read More
KVASER INTERVIEW – EDVIN BENGTSSON
Every two weeks there will be an interview with one of our employees where you can get to know them for real! This week we have an interview with two Read More
Read More
Kvaser’s February 2021 Software Release
Kvaser's latest software release extends support for CAN FD, such as virtual CAN FD and ISO-TP FD channels within J2534. A new autobaud programming fe Read More
Read More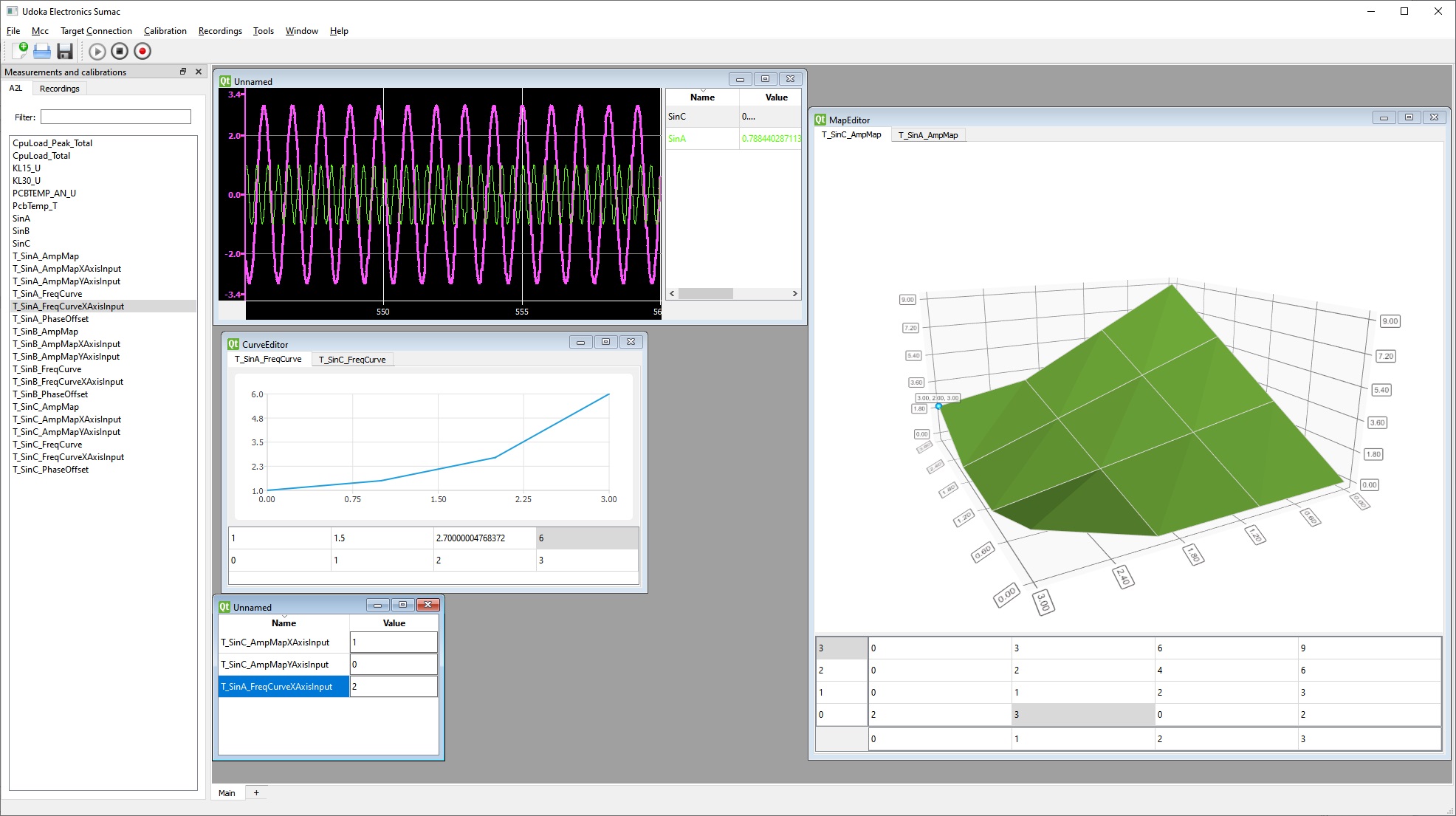
Udoka Electronics joins Kvaser’s TA network
Udoka Electronics, an independent software provider based in the Gothenburg region, has joined Kvaser’s TA network. Read More
Read More
Kvaser and partners toolchain supports UniSA Motorsport’s 2021 electric contender
The Formula SAE Team of the University of South Australia, UniSA Motorsport, is continuing a relationship with Pi Innovo, MathWorks and Kvaser to help Read More
Read More
SHROVE TUESDAY
Yesterday we at Kvaser enjoyed fantastic pastries (semlor) from Steinbrenner & Nyberg. Today there are many different “semla” varietie Read More
Read More
KVASER INTERVIEW – SVEN SANDEN
Every two weeks there will be an interview with one of our employees where you can get to know them for real! This week we have an interview wi Read More
Read More
All-in-one CAN, CAN FD & LIN Simulation Kit
Kvaser Technical Associate, Warwick Control Technologies, has released the CAN CAN FD LIN Simulation Kit, a new package that pairs… Read More
Read More
Team Solarium use Kvaser interfaces to improve their CAN architecture
Team Solarium is a group of engineering students from Pimpri Chinchwad College of Engineering, Pune that has designed and manufactured… Read More
Read More
Swedish automotive software specialist joins Kvaser’s TA network
Diadrom Software AB, a wholly owned subsidiary of Diadrom Holding AB (publ), has joined Kvaser’s Technical Associate (TA) network. The… Read More
Read More linkedin
linkedin twitter
twitter youtube
youtube youku
youku weixin
weixin