News

Now Available: CAN and LIN Communications on a Single Device
We’re happy to announce that our Kvaser Hybrid 2xCAN/LIN (EAN: 73-30130-00965-3) is now available. It’s the world’s first hybrid CAN/LIN communication Read More
Read More
Tools for Troubleshooting CAN and NMEA 2000® with Warwick Control
A walk through the tools and process used to analyse and troubleshoot the CAN bus portion of the NMEA 2000® serial network standard to the marine indu Read More
Read More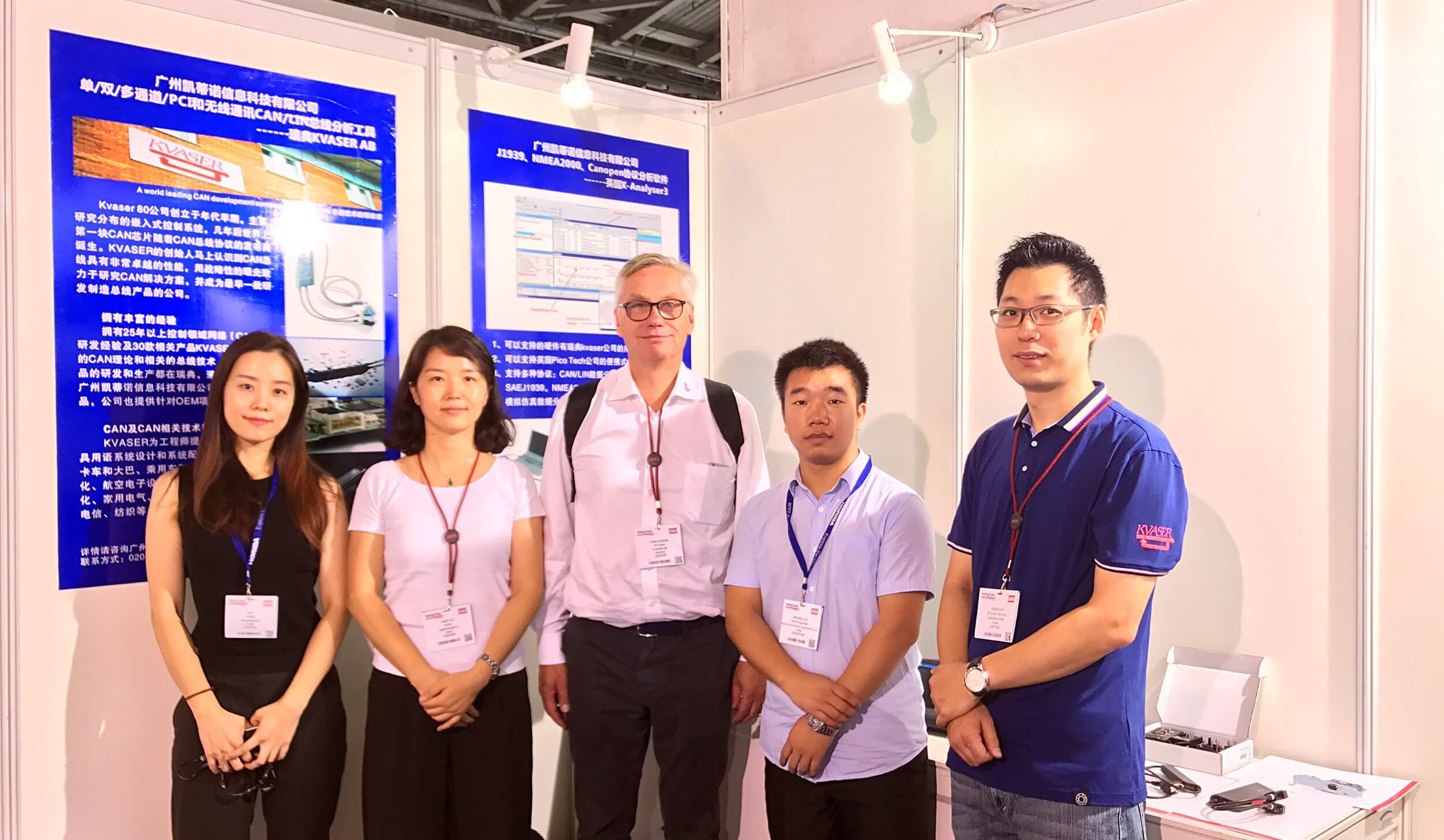
Automotive Test Expo China
The Automotive Test Expo in Shanghai, China concluded on September 22, 2017. The test and measurement show has been growing… Read More
Read More
Kvaser Hybrid 2xCAN/LIN Media Package
This is the Kvaser Hybrid 2xCAN/LIN Media package. Below are download links for Datasheets, user guides, photos, and Declaration of… Read More
Read MoreKvaser Software Release September 2017: Local Timestamp and Multiple Triggers Added
Kvaser has added local timestamp, multiple triggers, and a new timezone setting in the Converter library within Kvaser CANlib SDK. Read More
Read MoreKvaser 2017 Product ‘Not For New Design’ (NFND) Announcement
Not For New Design (NFND) announcement for Kvaser Leaf Light Rugged HS and Kvaser USBcan R. Read More
Read More
Meet the Next Generation of Rugged CAN USB Interfaces
Our new interfaces are designed to handle real-world conditions in the field without missing a beat. Read More
Read More
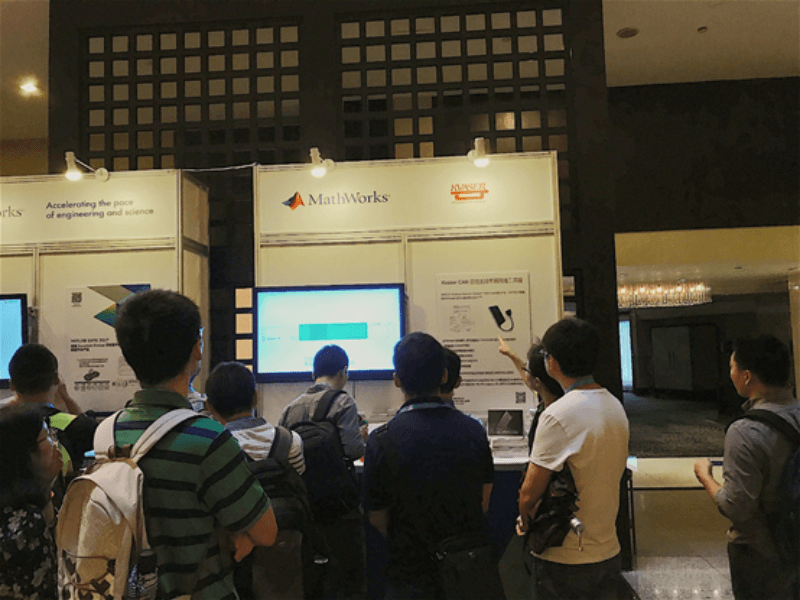
Kvaser CAN interface supports MathWorks Vehicle Network Toolbox
As one of the associates for MathWorks hardware support, Kvaser participated in the MATLAB EXPO 2017 China User Conference. Throughout the show, Kvase Read More
Read More
Caterpillar uses Kvaser Memorator Pro 2xHS v2 datalogger for machine demo
A Field Application engineer for Caterpillar Oil & Gas, used a Kvaser Memorator Pro 2xHS v2 dual channel CAN interface and datalogger to record CA Read More
Read More linkedin
linkedin twitter
twitter youtube
youtube youku
youku weixin
weixin