News

On-demand CAN XL Webinar now available
Our Autumn webinar on CAN XL is now available on-demand. In this one-hour discussion, Kvaser’s Research manager, Kent Lennartsson, and… Read More
Read More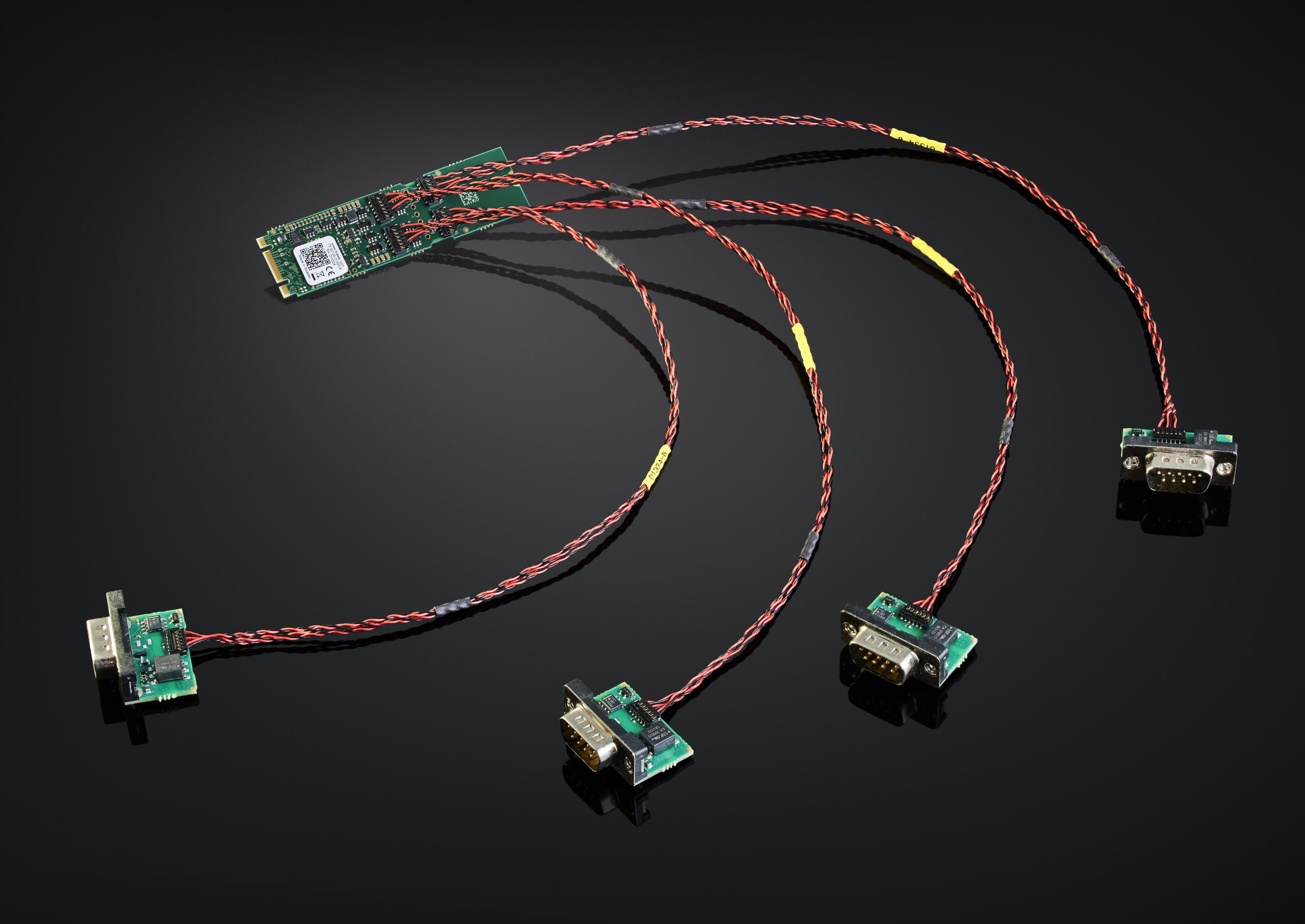
Kvaser unveils a compact embedded board with four distributed CAN modules
Kvaser’s smallest embedded board is now available. The Kvaser M.2 PCIe 4xCAN (01333-9) has four distributed controller area network (CAN)… Read More
Read More
The Kvaser Leaf v3: New Features, Same Great Look
Kvaser Leaf Light HS v2 Only 8,000 messages per second Only Classical CAN No Silent Mode 100 µs Timestamp Resolution… Read More
Read More
All about MagiSync
MagiSync is a key feature of Kvaser’s Pro devices. Working in the background to automatically synchronise clock ticks across multiple… Read More
Read More
Finnish partner, TK Engineering, turns 20
TK Engineering Oy (TKE), a Kvaser partner since it was founded 20 years ago, is a great example of the… Read More
Read More
Kvaser’s CAN hardware in Top Dutch Solar’s telemetry system
On-board Top Dutch Solar Racing’s car, one of the 2023 contenders at the Bridgestone World Solar Challenge, is a Kvaser… Read More
Read More
Kvaser’s September 2023 Software Release
Kvaser’s September software update is live. Please visit our Downloads page for the latest release notes. The Kvaser CANlib… Read More
Read More
Kvaser fills key engineering, business development and marketing roles
Kvaser is pleased to welcome Tobias Stalfors to our ranks. As Chief Technology Officer, his post brings together responsibility for… Read More
Read More
Pre-release: Announcing a compact embedded board with four distributed CAN modules
Kvaser will shortly announce availability of the Kvaser M.2 PCIe 4xCAN (01333-9), a highly integrated embedded board with four distributed… Read More
Read More
Introducing the Kvaser Leaf v3
Stable, trouble-free operation, with added CAN FD and silent mode. The Kvaser Leaf series represents one of the easiest and… Read More
Read More linkedin
linkedin twitter
twitter youtube
youtube youku
youku weixin
weixin