Automotive

From complexity to control: Bridging SIL and HIL with RemotiveLabs, ECM and Kvaser
An OEM needed an affordable, flexible HIL setup. Combining RemotiveLabs’ cloud-native simulation platform with Kvaser’s PCIe interfaces, Linux driversRead More
Read More
ATI’s Vision with EDT & the Kvaser U100: A perfect match
Accurate Technologies Inc. (ATI) shows off its Vision software with Enhanced Diagnostic Toolkit (EDT) combined with the Kvaser U100 interface…Read More
Read More
ODOS at the UK’s Instrumentation, Analysis & Testing Exhibition, 17 May
ODOSOLUTIONS AB (ODOS), a Kvaser AB technical partner, will demonstrate its soon-to-be-released Zetalog Edge Cloud 5G Gateway at the on…Read More
Read More
Stable, CAN communication modules ensure that Audi’s diagnostics data always gets through
Automotive endurance testing creates 100,000s of hours of test data per vehicle. Kvaser’s DIN Rail Ethernet to CAN/CAN FD interface and RA Consulting’Read More
Read More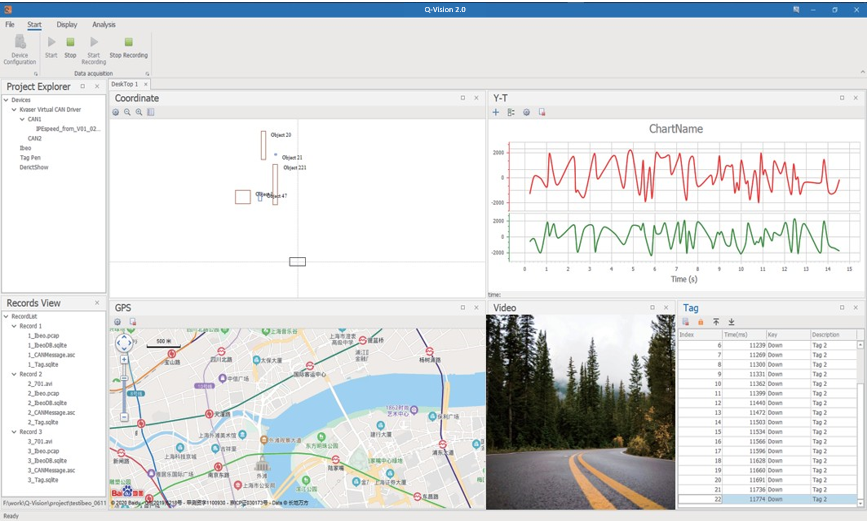
Solution with Q-Vision + Kvaser CAN/CAN FD/LIN
Fast development of intelligent networking technology in China, coupled with the driving forces for vehicle intelligent networking, has led to…Read More
Read More
Team Solarium use Kvaser interfaces to improve their CAN architecture
Team Solarium is a group of engineering students from Pimpri Chinchwad College of Engineering, Pune that has designed and manufactured…Read More
Read More
A CAN test system for accident reconstruction & road testing
Automotive forensic analysis experts use Kvaser interfaces in a real-time data recorder for use in road tests and accident reconstruction.Read More
Read More
High voltage test and measurement specialist joins Kvaser’s TA network
Kvaser AB has signed a Technical Associate (TA) agreement with test and measurement specialist, Klaric GmbH & Co. KG. The…Read More
Read More
CAN, CAN FD, and LIN Network Analysis In One Tool From Warwick
Warwick Control Technologies has released a new version of the powerful network analysis tool X-Analyser (version 3.12.0). This now provides…Read More
Read More
Warwick Releases Enhanced NMEA 2000® & SAE J1939 Features in X-Analyser
Warwick Control announces latest release of the powerful tool X-Analyser; includes enhanced features for NMEA2000 and SAE J1939.Read More
Read More