Kvaser announces an upgrade to the Ethercan (CAN-over-Ethernet) product line with the Kvaser Ethercan HS (EAN: 73-30130-00976-9).
Product Release: Kvaser Ethercan HS
28/03/2019
by Kvaser
Ethercan Product Line Updated with New & Improved Solution
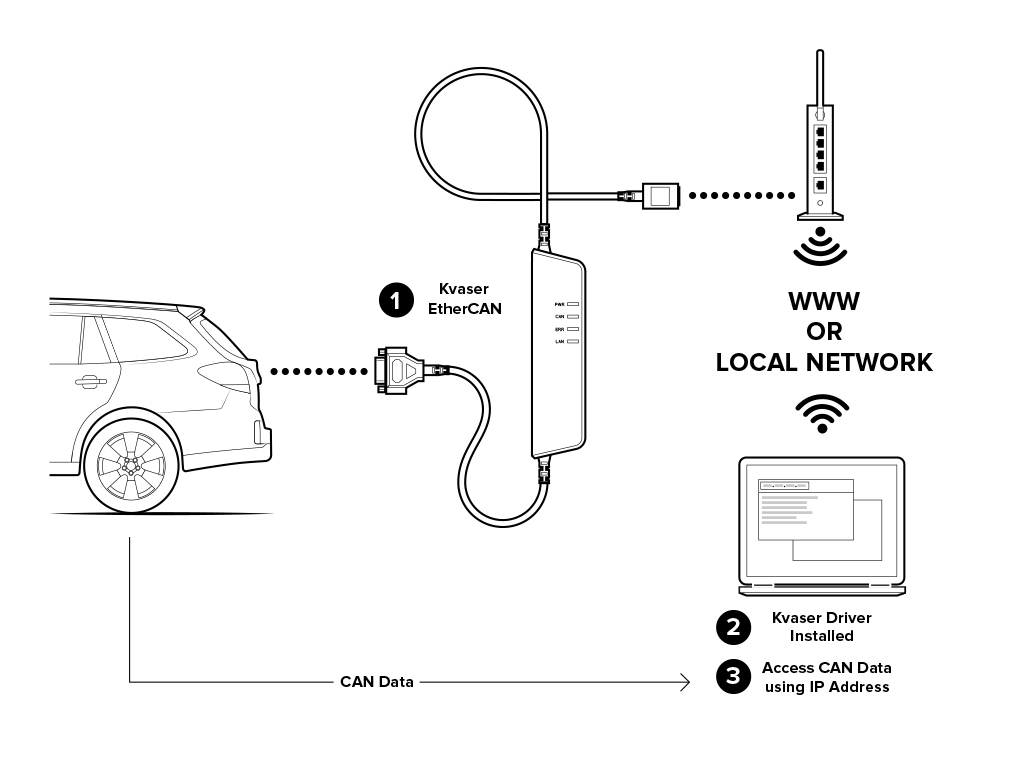
The Kvaser Ethercan HS is a powerful, real-time Ethernet to CAN interface that, when linked over the Internet to an Ethernet-equipped PC, allows CAN data to be remotely accessed from anywhere in the world.
Built-in Power over Ethernet eliminates the need for a separate power cable when you can’t power the device from the CAN bus.
Kvaser’s Ethercan product range makes it easy to implement the Internet of Things (IoT) concept by enabling data from any CAN product or system to be sent over a corporate network or the Cloud, using the standard Kvaser CANlib API. Users of the Kvaser Ethercan HS can also choose to connect to the device using the built-in REST API for web-enabled devices, such as smartphones.
As a programmable interface, the Kvaser Ethercan HS is suited to advanced applications, such as ECU reflashing. For example, a t program could be created to process CAN messages locally in the device, removing the latency of WiFi and/or Ethernet.
Why use a programmable interface?
WiFi or Ethernet latency is the source of many a lost hair to some of our customers! Take the example of an advanced application such as ECU reflashing, where fast round-trip responses are needed. Latency can manifest at the PC, when sending a CAN message, and when the PC is reading a return response. Whilst latency can be handled in software when it is a know value; unpredictable sources of latency are a problem. WiFi or Ethernet latency is unpredictable because random delays are created.
Some CAN interfaces are better suited than others at handling this problem. If latency is an issue for your application, a programmable interface is the answer! For example, Kvaser Ethercan HS users can implement the CAN protocol in a t program (simple to create in Kvaser’s CANlib SDK, which is free to download) and run it as a script locally in the device, thus avoiding any impact from WiFi or Ethernet delays as the message timestamp comes from the interface itself.
This approach could also be advantageous to users of Kvaser’s REST API. A program can be written to process the CAN messages locally on the interface, so that just the required information is sent to the host PC. The alternative of transmitting all messages over REST is not that efficient because of the overhead of http and the json coding.
When using a CAN interface to transmit a Diagnostic Protocol command, the program typically expects a message response within a certain period before it ‘timeouts’. Without programming the CAN message flow, the program could timeout most of the time. Programming a Kvaser interface to avoid this situation isn’t as complex as it sounds, thanks to Kvaser’s comprehensive software resources and example files, and it could be much less time-consuming then repeated timeouts. And if you don’t want to create a program for your interface, get in touch with Kvaser to find a Kvaser technical partner that can create one for you.
The Kvaser Ethercan HS (00976-9) is available for sale immediately. For datasheets, user guides, and more, please visit the product page here.


Ethercan In Action: DataJob Case Study
[To Download the PDF, please click the title.]